2021年12月7日,科技部高技术研究发展中心组织专家以现场考察和线上会议的方式,对深圳市汇川技术股份有限公司牵头承担的国家重点研发计划“工业机器人伺服系统产品性能优化及工程化应用”(2017YFB1300900)项目进行了综合绩效评价。2022年3月24日,科技部下达该项目综合绩效评价结论为通过,绩效等级为优秀。
我院承担了该项目中的“复杂工况下工业机器人高性能伺服控制技术”课题,刘振焘、熊永华、张传科、李丹云、何王勇等老师为课题组成员。课题组围绕复杂工况下的工业机器人高精度控制问题,开展了高精度惯量识别、控制参数自整定、转矩脉动及外部扰动主动抑制和工业机器人末端振动抑制等研究工作,提出了一系列新技术和新方法,建立了2套伺服系统高精度控制实验装置,开发了1套工业机器人伺服系统控制软件。在IEEE Transactions on Industrial Electronics,Nonlinear Dynamics等控制领域顶级期刊,IEEE Annual Conference of the Industrial Electronics Society,中国控制会议等国内外控制领域顶级会议中发表论文24篇,授权国家发明专利8项,登记软件著作权2项。
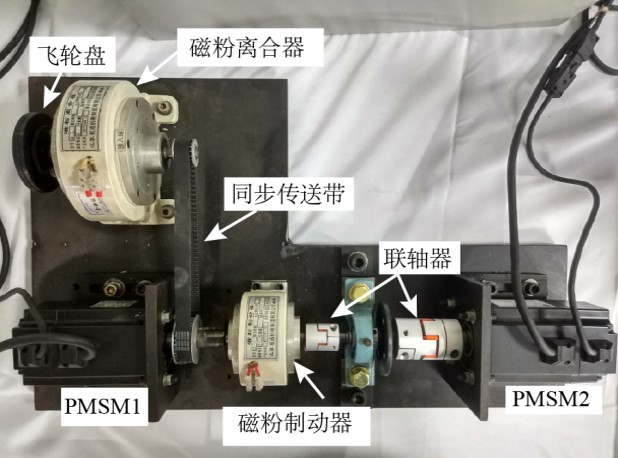
伺服系统高精度控制实验装置
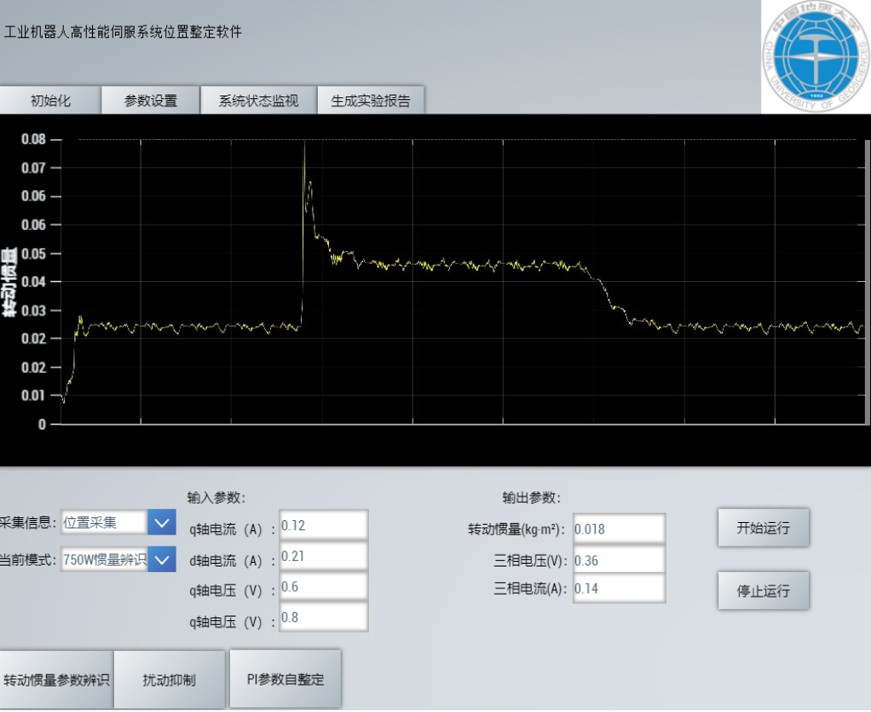
工业机器人伺服系统位置整定软件
项目综合绩效评价专家组认为,该项目完成了任务书规定的研究内容和主要考核指标,实现了工业机器人国产伺服系统的批量化应用,为我国工业机器人伺服系统产品技术赶超国际先进水平发挥了极大的作用。建议项目组进一步加强项目成果的推广应用,为我国工业机器人伺服系统产品技术赶超国际先进水平发挥更大的作用。

